Dependable Distributed Sensing Systems (D2S2)
Research
The fundamental research question this project addresses is: How can we exploit large-scale and mobile distributed sensor systems to reason about aggregate spatio-temporal phenomena?To this end this project plans to contribute in the following three fields of research:
- The development of an algorithmic and theoretical framework for programming large-scale distributed sensor systems in an adaptive and volatile manner such that the system remains dependable despite its mobile and generally unpredictable nature. (Embedded Software group).
- The development of a miniaturized radar sensor that can operate under a wide range of ?difficult? environmental conditions (smoke, fog, etc.). This line of research is firmly rooted in the experience of TNO (radar) and UTwente (circuit design).
- The design and implementation of localization and tracking algorithms using the radar sensor and dependability IDE outlined above. This line of research builds on the experience of both partners from Delft.
In the particular case of emergency evacuations, a strong bias is frequently observed towards some of the exits, while the rest are not used to their potential. That is due to of a variety of reasons. Foremost, people tend to trust in majority decisions and thus follow each other. Another reason is panic. Panic epidemically propagates along a crowd and hinders its ability of thinking critically. Due to the dangers of collective motion, researchers have made significant effort to model the behavior of crowds. Through various models, they focused on studying, simulating, and predicting hazardous behavior. The research however concerns almost exclusively off-line analysis of crowd dynamics and its optimization through re-designing the crowd?s environment. On the contrary, we aim to guide the motion of crowds by observing their behavior providing feedback in real-time. We aim to do so by the use of wireless ad-hoc networks.
Our main assumption is that the crowd is device-enabled, i.e., that each pedestrian, or a sufficient portion of pedestrians, carries a wireless-enabled device. As such, we can deduce the crowd mobility from that of the wireless network. The volatility and sheer size of a crowd, demands that we avoid the overhead of a centralized solution. To ensure scalability, we compute and store all information on the network itself in the form of scalar fields that describe a local quantity, i.e., information potentials. Due to the smoothness and modality properties of these fields, nodes can be directed towards appropriate exits by means of greedy distributed primitives that operate on the observable gradients.
Local reasoning in large-scale dynamic networks
Think of the information on a network as a landscape: hubs are peaks, arrows reveal the local information gradient. The information (value of each node) may be sensor data (e.g. temperature, vibrations, crowd panic) or relate to network status data (traffic, energy). In the image below, the landscape is shown through the colored Voronoi graph of the network. The color of each Voronoi cell reveals the value of the information of the node in its center (in this case the node degree). In that sense, the peaks (in blue) of the landscape are the areas of rich information, the valleys (in white) are less interesting, and we can find short paths towards peaks by following the path of steepest ascend.We study how local rules reshape an information landscape, revealing fundamental information trends. I.e., we propose decentralized algorithms for changing the architecture of a landscape, essentially controlling the influence of various phenomena (peaks/valleys) according to their relative importance (scale).
In this video, the network reveals its most connected area by reshaping the node density landscape.
Applications
Using the information landscape, the nodes of a network can answer questions relating to global phenomena using only a local view.- Search/routing -- ?Can I find short paths towards the areas of rich information/higher values??
- Reasoning/inference -- ?My value is larger than that of my neighbors. Is this a local or a global phenomenon? ?
For more information, see the
project homepage.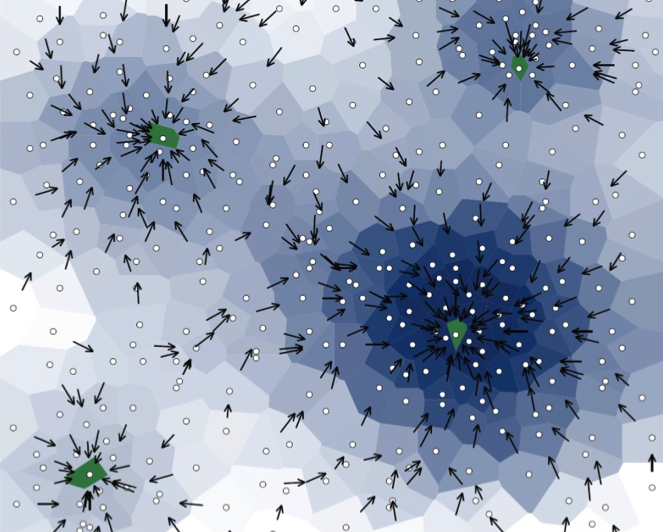
Project data
| Researchers: | Koen Langendoen, Geert Leus, Andrea Simonetto |
|---|---|
| Starting date: | September 2010 |
| Closing date: | January 2015 |
| Funding: | 500 kE; related to group 250 kE |
| Sponsor: | STW ASSYS |
| Partners: | TU Delft Fac. EEMCS (ES, CAS groups); University Twente; TNO |
| Contact: | Geert Leus |