MSc thesis project proposal
MIMO radar for automotive applications
Project outside the university
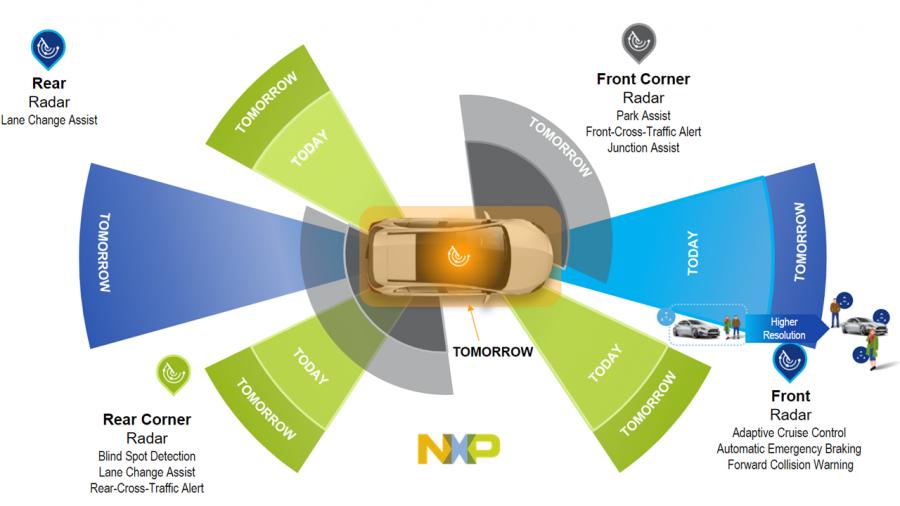
NXPNXP (Eindhoven) develops radar solutions for automotive applications. They offer a selection of thesis topics (to be carried out parttime at NXP, parttime at CAS):
- Codesign of 2D antenna array and DOA estimation algorithm for FMCW MIMO automotive radar
In automotive radar applications, there is a need for high-resolution joint azimuth and elevation (i.e., two-dimensional (2D)) direction-of-arrival (DOA) estimation of the targets. However, typical automotive radar sensors have a limited number of transmit (Tx) and receive (Rx) antennas. Therefore, high-resolution 2D DOA estimation is challenging to achieve. These challenges promoted the use of MIMO radar techniques to increase the degrees of freedom in DOA estimation and, thereby, angular resolution. Still, designing the 2D MIMO antenna array with a limited number of physical Tx and Rx antennas that allows for high-resolution DOA estimation of both azimuth and elevation with reasonable computational load is challenging. For this reason, co-design of the 2D antenna array and the algorithm for DOA estimation is needed.
- Doppler and DOA estimation for Beamspace DDMA FMCW MIMO radar
The Frequency-Modulated Continuous Wave (FMCW) waveform with Doppler division multiple access (DDMA) for transmit (Tx) antenna coding (i.e., orthogonalization) is a popular low-complexity approach for implementing MIMO automotive radar. The DDMA MIMO coding enables the separation of Tx antennas at the receiver (Rx) and the creation of a virtual antenna array with an increased number of antenna elements compared to the physical Rx array. However, the DDMA coding of Tx antennas introduces varying mutual phase shifts over the FMCW chirps and thus, at the same time, does beamforming of Tx antennas. The DDMA creates uniform beamforming over the −90° to 90° field of view (FOV). However, in practical scenarios, to improve the range and spatially focus Tx power, the Tx array should beamform Tx power in a more narrow FOV (e.g., −70° to 70°, −50° to 50°, −15° to 15°). Therefore, the classical DDMA codes need to be redesigned as well as algorithms related to Doppler and DOA estimation to support simultaneous MIMO coding and flexible Tx beamforming.
- Fusion of mono-static and bi-static radar response in sparsity based DoA algorithms using Multiple Measurement Vectors technique
We consider direction-of-Arrival estimation techniques that use measurement data obtained from multiple radars distributed on the car’s fascia. Such a system could result in an increased target separation in the direction of arrival dimension whilst keeping the physical dimensions of the individual radars small. For coherent operation synchronization in time, frequency and phase is needed. Quasi-coherent operation doesn’t require phase coherency. The measurement data obtained from multiple radars can be grouped in mono-static and bi-static responses. Depending on the system coherency and target coherency this data can be processed in a coherent way, a non-coherent way or a mix of coherent and non-coherent processing. The best target separation is obtained with fully coherent processing. Sparsity based algorithms for DoA estimation, like Sparse Bayesian Learning (SBL) and FOcal Underdetermined System Solve (FOCUSS), are gaining interest. These algorithms assume that the multi-antenna response as measured by the radar is caused by a small number of targets. In an iterative way the measured response is matched with a sparse collection of sources. Multiple Measurement Vectors technique in relation to sparsity based DoA algorithms usually refer to time sequential measurements with an individual radar system. With the distributed radar architecture as mentioned before, the collection of mono-static and bi-static response can be regarded as multiple measurements with slightly different perception on the radar scene. The underlying sparsity of targets for the multiple measurements can have high correlation for a coherent target scene, but for a non-coherent radar scene a target might be not seen by all individual radar sensor
- Subspace techniques for DoA estimation with distributed radar
Subspace techniques are well-known methods to estimate DoA angles in mono-static radar. These techniques try to decompose the received signal in a signal subspace and a noise subspace. For every target in the measurement data, a dimension in the signal subspace will be present with its corresponding DoA angle. With bi-static radar, a target will be represented with a DoD angle and a DoA angle that via the detected Range and the distance between the 2 radar sensors are geometrically related. The DoD and DoA angles are also the DoA angles of the 2 mono-static radar responses.
- Joint subspace based DoA estimation and calibration of antenna arrays
The goal is to quantify the impact of antenna imperfections on the performance of subspace techniques for DoA estimation. Subspace techniques that assume shift invariance properties (e.g. ESPRIT) will suffer from antenna imperfections and therefore degrade the DoA estimation algorithm. The student is expected to make a model of antenna imperfections and generate realizations of that model that can be analyzed with a subspace based DoA estimation algorithm. Also investigating low-complexity calibration methods for the antenna imperfections is part of the assignment. The theoretical work is supposed to be verified with experiments in which the antenna imperfections of a radar sensor are measured and DoA estimation algorithms with and without compensation methods are evaluated.
Assignment
The exact assignment depends on the selected topic and the background/experience of the student, and is defined together with the student.
Requirements
Each project requires a self-motivated candidate with a strong background in optimization, statistical signal processing, array signal processing, estimation theory, and some familiarity with radio frequency (RF) and radar concepts. The ideal candidate feels challenged by both theoretical and practical problems. The activities on the project require knowledge of Matlab programming. Through the project, the candidate will have the opportunity to develop industry-relevant signal processing and engineering skills.
Through the project, you will be involved in solving practical, cutting-edge signal problems present in modern automotive radars. During this journey, you will not be alone, and you will be supervised by supervisors at the university and experienced engineers from NXP. Therefore you will have the opportunity to use and further develop your signal processing knowledge gained during MSC studies by solving a challenge of practical importance for the next generation of automotive radars. Depending on your results, you will also have the opportunity to write a scientific publication and file a patent.
Contact
prof.dr.ir. Alle-Jan van der Veen
Signal Processing Systems Group
Department of Microelectronics
Last modified: 2022-10-04